SuMaEM: Efficient LiDAR-based Semantic SLAM with EM ICP
Published:
Improved the original Semantic ICP in SuMa ++ with Semantic ICP through Expectation-Maximization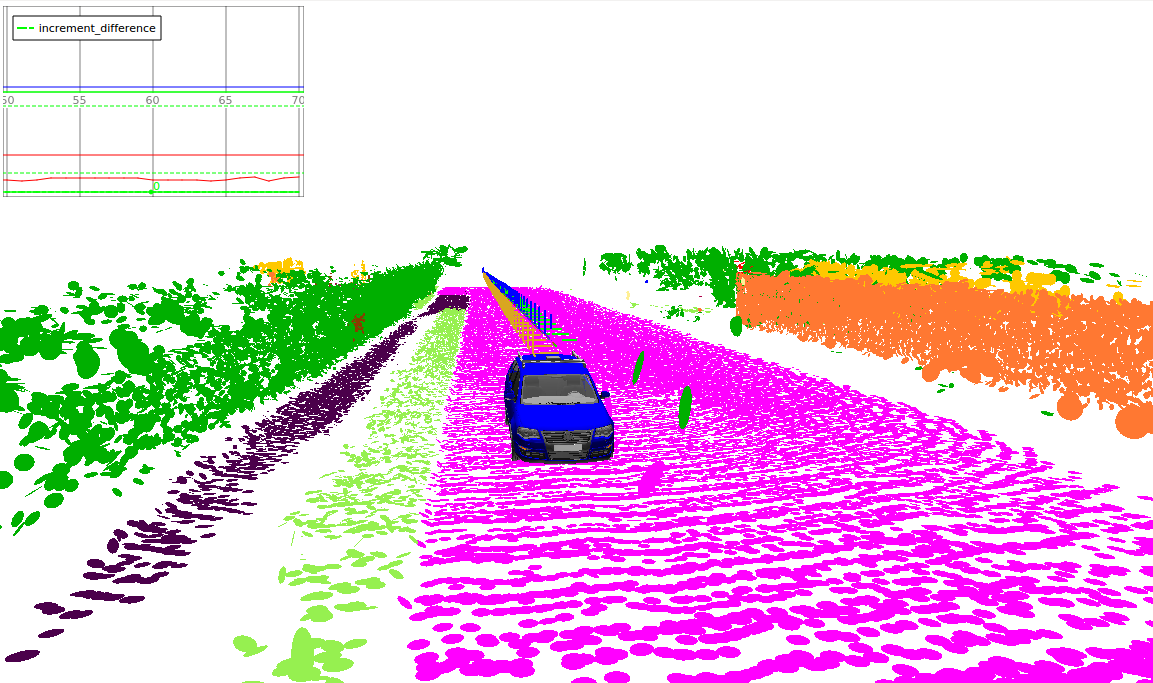

Published:
Improved the original Semantic ICP in SuMa ++ with Semantic ICP through Expectation-Maximization
Published:
TOP 1 out of 19 Teams in image classification task and TOP 3 out of 13 Teams in vehicle localization task
Published:
I was responsible for the electronic system and visual traking system of a robot named HERO, which is showed below.
Published:
Reconstruct the 3D environment with semantic labels and vehicle orientations.
Published:
Recognize the handwriting digits in the real environment